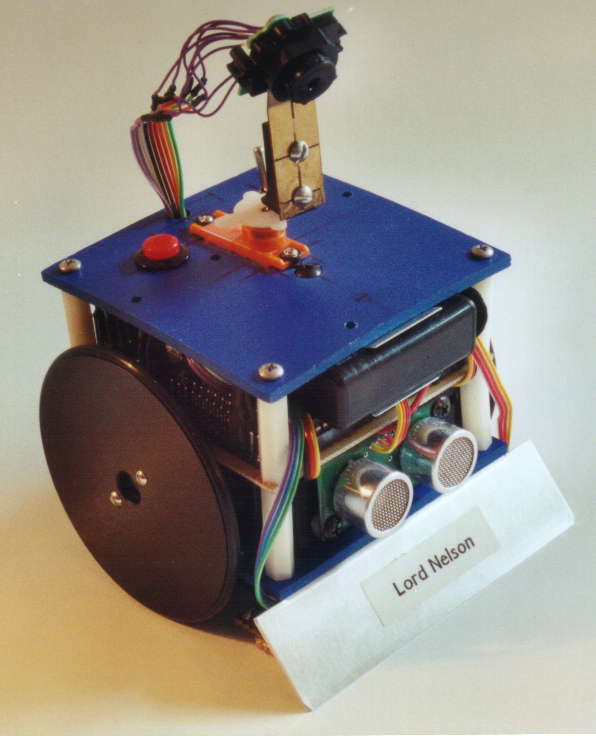
Lord Nelson is an autonomous mini-sumo fighting robot, designed to compete in the 500g robot sumo class (see Robot Mini-Sumo Rules).
It is based on a Motorola 68332 microcontroller board, with 512KB RAM and 512 KB Flash program memory. This is the Mini RoboMind from Robominds.com.
The robot has sonar, vision and line sensors to detect the opponent and the perimeter of the ring. The sonar sensor is the Devantech SRF04 UltraSonic Ranger. The image sensor is a monochrome CMOS device, hacked from a Gameboy Camera. The line sensors are simply CdS cells.
Locomotion is provided by two standard Hitec HS-300 hobby servos modified for continuous rotation, with odometry feedback from small optical sensorsmounted behind the wheels (refer to my SRS Encoder article Implementing Dead Reckoning by Odometry on a Robot with R/C Servo Differential Drive for details).
Power to the servos is provided by four AA-size rechargeable batteries mounted underneath the robot (this also serves to keep the center of gravity low). A separate rechargeable 9-volt battery provides power to the microcontroller board and electronics.
The software is written in GNU C/C++, and uses a reactive paradigm architecture (essentially a totally behavior-based approach). This software leverages reusable components of the MotoRobots software libraries.